During the period of Jan 10. – February 10. we received 54 replies. At the same time the ogre 13.2.4 Windows SDK alone was downloaded 2188 times. So while the results are insightful, they are probably not representative.
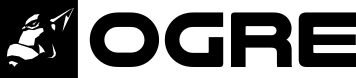
When it comes to RenderSystems, we finally see a significant drop for the legacy systems (D3D9, GL). This will allow us to focus on new features only supported on modern APIs. However, I doubt the numbers for Vulkan, given how recent the Vulkan addition was.
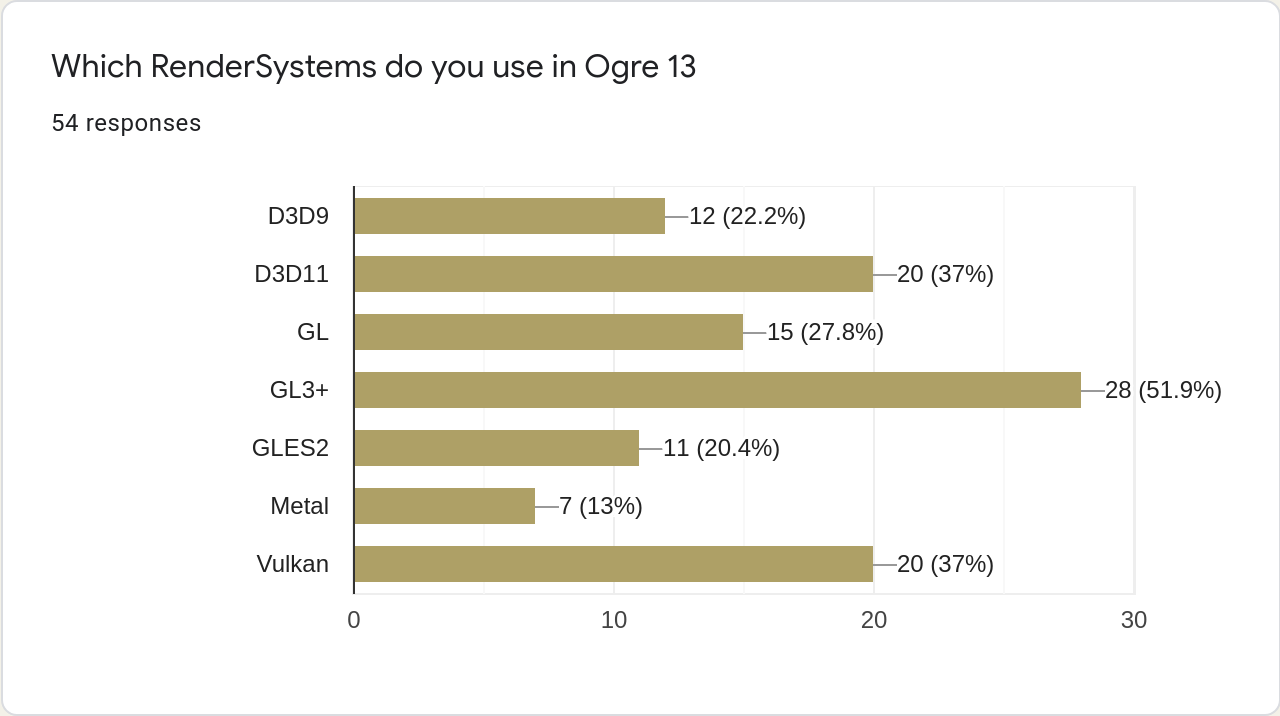
The most relevant result for further development is likely the question of target audience. Here, we see an increase of the enthusiast portion at the cost of the Enterprise one. I take it as we can sacrifice some API stability to gain modern rendering techniques when moving forward.
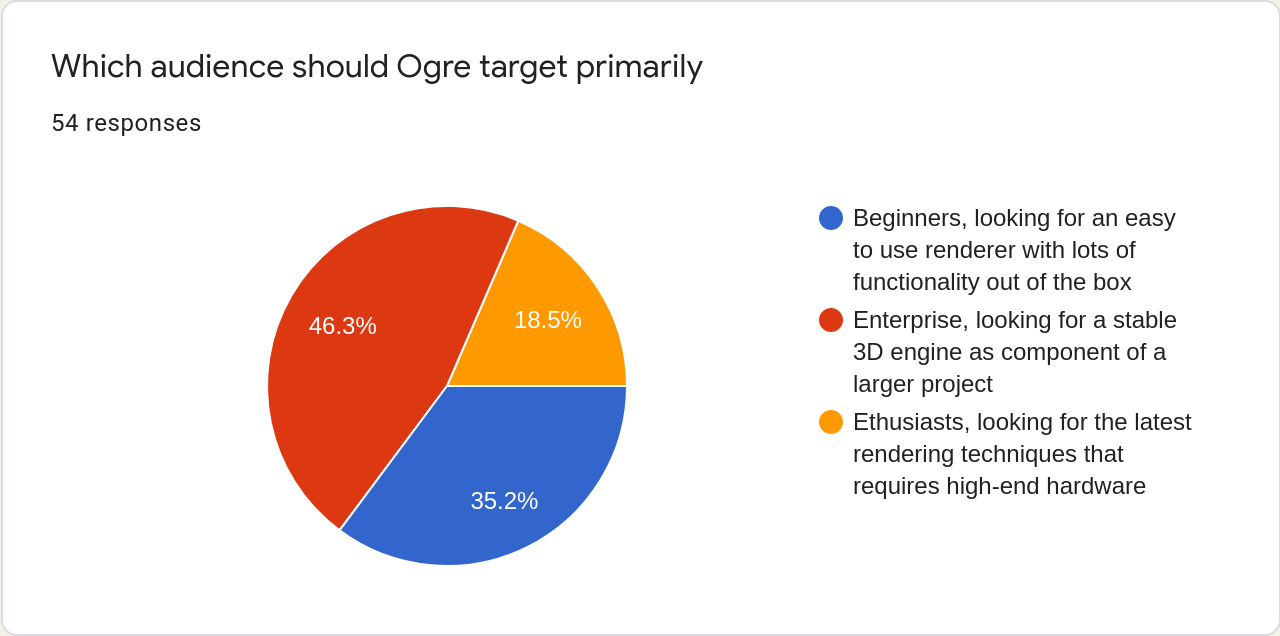
The following one is also interesting, as the HLMS was dropped with Ogre 13 and the inclusion in the poll is a copy/ paste error. I guess that any component with less than 18 votes is not actually used, but people were merely ticking every option.
The parameters are expected to be in the green and blue channels (as per glTF2.0) and lighting will be done according to the Filament equations. Alternatively, you can use material-wide settings, by omitting the texture part like:
Here, metalness is read from specular[0] and roughness from specular[1].
Furthermore, the Assimp Plugin will automatically use the PBR pipeline, if it encounters any PBR maps. This in turn allows correctly loading and displaying glTF2 meshes – as shown in the ogre-meshviewer screenshot above.
Improved Gamepad Support
The Gamepad Support in OgreBites (via SDL2) has been improved. Now the according events are correctly delegated to ImGui, so you can control the UI with your gamepad.
Also additional gamepad mappings can be specified by placing a gamecontroller.txt in the working directory.
Those of you who have been around Ogre for some time might remember that back in 2020, we conducted a survey about our user base. The results of which can be found here.
For the Ogre 13 development cycle we would like to assess to correctly emphasize the development on the most used features.
So for the next four weeks until the 10th of February, you have the chance to participate and help us to get an impression about our user base, how Ogre is used and share some wishes for the future. Simply follow the link and make your way through the 14 questions. It should not take up much time since most of the questions are simple checkbox or radio button questions.
We want to thank you all upfront for helping us to develop Ogre further and getting some valuable insight information about the people using the engine!
PS: We would be glad if you could spread the word about the survey via all available channels to all potential Ogre users, because: The more participants, the more accurate are the results of course.
With default settings on Clang on Linux, there’s no errors (except on OgreMeshTool).
But we haven’t taken a look at deprecated warnings yet.
On Apple/XCode and MSVC there’s very few warnings now
GCC needs Wconversion off because it’s incredibly dumb. It’s got too many false positives. Fixing them would hurt readability too much, causing more harm than good.
Some CMake settings may cause warnings, e.g. we generate lots of warnings if OGRE_CONFIG_DOUBLE is on.
We also applied clang format to everything, and added C++11 override everywhere.
We’ve also removed dead code and added an option to turn off custom memory allocators off which is the default.
We’ve removed Boost, thus CMake won’t waste its time (and that was a lot) looking for an optional dependency we didn’t really need anymore.
Overall in Debug builds we’re seeing a 20% reduction in binary size (incl. symbols)!! While Release builds have between 1% and 3% reductions.
The only drawback is that merging code 2.3 -> 2.4 is now harder as it’s almost guaranteed to cause a merge conflict, since nearly every line got touched.
Nonetheless it seems that merging by “merge using always theirs”, then applying clang format, then seeing the diff of what’s going to be merge is a good approach to prevent bad merges and fix accidentally introducing bugs
The numbers are in MBs
Linux Clang 9 – Debug
Lib Name
Before (2.3)
After (2.4)
Diff
libOgreHlmsPbs_d.so
8,69
7,53
-15,48 %
libOgreHlmsUnlit_d.so
1,92
1,59
-20,48 %
libOgreMain_d.so
65,00
55,01
-18,17 %
libOgreMeshLodGenerator_d.so
4,27
3,71
-15,11 %
libOgreOverlay_d.so
3,87
3,30
-17,23 %
libOgreSamplesCommon_d.a
10,80
9,10
-18,64 %
libOgreSceneFormat_d.so
2,55
2,03
-25,44 %
Plugin_ParticleFX_d.so
1,79
1,63
-9,85 %
RenderSystem_GL3Plus_d.so
6,97
5,23
-33,25 %
RenderSystem_NULL_d.so
1,70
1,35
-25,87 %
RenderSystem_Vulkan_d.so
15,82
14,63
-8,18 %
Total
123,39
105,12
-17,39 %
Linux Clang 9 – Release
Lib Name
Before (2.3)
After (2.4)
Diff
libOgreHlmsPbs.so
0,80
0,78
-3,03 %
libOgreHlmsUnlit.so
0,19
0,19
-3,58 %
libOgreMain.so
7,31
6,93
-5,61 %
libOgreMeshLodGenerator.so
0,24
0,22
-5,21 %
libOgreOverlay.so
1,00
1,00
-0,14 %
libOgreSamplesCommon.a
0,43
0,41
-3,85 %
libOgreSceneFormat.so
0,23
0,23
0,95 %
Plugin_ParticleFX.so
0,25
0,24
-5,38 %
RenderSystem_GL3Plus.so
0,85
0,76
-11,86 %
RenderSystem_NULL.so
0,16
0,16
-0,94 %
RenderSystem_Vulkan.so
7,93
7,91
-0,22 %
Total
19,40
18,83
-3,02 %
MSVC 2019 – Debug
Lib Name
Before (2.3)
After (2.4)
Diff
OgreHlmsPbs_d.dll
1,89
1,82
-3,45 %
OgreHlmsPbs_d.pdb
15,53
12,82
-21,15 %
OgreHlmsUnlit_d.dll
0,47
0,45
-4,50 %
OgreHlmsUnlit_d.pdb
9,51
6,89
-37,96 %
OgreMain_d.dll
24,28
22,81
-6,45 %
OgreMain_d.pdb
101,56
81,94
-23,94 %
OgreMeshLodGenerator_d.dll
1,02
0,98
-4,90 %
OgreMeshLodGenerator_d.pdb
10,57
8,64
-22,34 %
OgreMeshTool_d.pdb
11,95
8,66
-37,98 %
OgreOverlay_d.dll
1,77
1,75
-1,45 %
OgreOverlay_d.pdb
13,28
9,50
-39,70 %
OgreSceneFormat_d.dll
0,58
0,57
-1,78 %
OgreSceneFormat_d.pdb
11,07
8,04
-37,82 %
Plugin_ParticleFX_d.dll
0,39
0,37
-5,59 %
Plugin_ParticleFX_d.pdb
6,18
5,12
-20,59 %
RenderSystem_Direct3D11_d.dll
2,02
1,90
-6,32 %
RenderSystem_Direct3D11_d.pdb
17,13
14,11
-21,37 %
RenderSystem_GL3Plus_d.dll
2,00
1,69
-18,41 %
RenderSystem_GL3Plus_d.pdb
16,17
12,25
-32,03 %
RenderSystem_NULL_d.dll
0,39
0,36
-8,09 %
RenderSystem_NULL_d.pdb
8,96
6,26
-43,04 %
RenderSystem_Vulkan_d.dll
17,69
17,58
-0,66 %
RenderSystem_Vulkan_d.pdb
104,54
87,89
-18,94 %
OgreSamplesCommon_d.lib
12,83
11,63
-10,28 %
OgreSamplesCommon_d.pdb
7,74
6,78
-14,18 %
Total
399,51
330,81
-20,77 %
MSVC 2019 – Release
Lib Name
Before (2.3)
After (2.4)
Diff
OgreHlmsPbs.dll
0,55
0,55
0,09 %
OgreHlmsUnlit.dll
0,14
0,13
-1,45 %
OgreMain.dll
6,91
6,82
-1,32 %
OgreMeshLodGenerator.dll
0,20
0,21
2,12 %
OgreOverlay.dll
0,71
0,71
-0,28 %
OgreSceneFormat.dll
0,17
0,17
0,00 %
Plugin_ParticleFX.dll
0,14
0,14
0,35 %
RenderSystem_Direct3D11.dll
0,52
0,51
-0,38 %
RenderSystem_GL3Plus.dll
0,59
0,54
-9,37 %
RenderSystem_NULL.dll
0,12
0,12
-2,54 %
RenderSystem_Vulkan.dll
3,81
3,80
-0,18 %
OgreSamplesCommon.lib
1,48
1,41
-4,72 %
Total
15,33
15,11
-1,44 %
That’s all for now. Ogre 2.3 was released just a week ago and we wanted to share such an exciting development already happening on 2.4.
First of all, Merry Christmas to all those who celebrate it on behalf of the OGRE Team! (and if you don’t, have a nice day too!)
Second, after a bit more than a year in development, Ogre-Next 2.3.0 is released!
Magnificent work on Device Lost handling by Eugene Golushkov!
Most games don’t care too much about device lost because games can assume they own almost the entire computer while they’re running, and nothing else will be happening. A device lost is considered a critical failure and very uncommon, typically because of a Hardware or Software malfunction. Or a Windows Update in the middle of a gaming session, in which case the gaming experience is already interrupted anyway.
However this is not true for non-gaming apps: device lost can happen because of multiple reasons, but the two most common are:
The graphics driver is upgraded
Switching from power saving mode to performance or viceversa (mostly on laptops or other mobile devices)
Due to these two reasons, device lost becomes an almost certainty for long-running applications that could encounter a graphics driver suddenly upgrading; or for mobile/laptop-oriented applications where power mode switching can be very frequent.
Recovering from device lost can range from very easy to very difficult; depending on the complexity of an application and what the application was doing at the time the device was lost.
Eugene’s work goes to great lengths to try to gracefully recover from a Device Lost.
Switch importV1 to createByImportingV1
In 2.2.2 and earlier we had a function called Mesh::importV1 which would populate a v2 mesh by filling it with data from a v1 mesh, effectively importing it.
In 2.2.3 users should use MeshManager::createByImportingV1 instead. This function ‘remembers’ which meshes have been created through a conversion process, which allows device lost handling to repeat this import process and recreate the resources.
Aside from this little difference, there are no major functionality changes and the function arguments are the same.
Shadow’s Normal Offset Bias
We’ve had a couple complaints, but it wasn’t until user SolarPortal made a more exhaustive research where we realized we were not using state of the art shadow mapping techniques.
We were relying on hlmsManager->setShadowMappingUseBackFaces( true ) to hide most self-occlussion errors, but this caused other visual errors.
Normal Offset Bias is a technique from 2011 (yes, it’s old!) which drastically improves self occlussion and shadow acne while improving overall shadow quality; and is much more robust than using inverted-culling during the caster pass.
Therefore this technique replaced the old one and the function HlmsManager::setShadowMappingUseBackFaces()has been removed.
Users can globally control normal-offset and constant biases per cascade by tweaking ShadowTextureDefinition::normalOffsetBias and ShadowTextureDefinition::constantBiasScale respectively.
You can also control them via compositors scripts in the shadow node declaration, using the new keywords constant_bias_scale and normal_offset_bias
Users porting from 2.2.x may notice their shadows are a bit different (for the better!), but may encounter some self shadowing artifacts. Thus they may have to adjust these two biases if they need to.
Unlit vertex and pixel shaders unified
Unlit shaders were still duplicating its code 3 times (one for each RenderSystem) and all of its vertex & pixel shader code has been unified into a single .any file.
Although this shouldn’t impact you at all, users porting from 2.2.x need to make sure old Hlms shader templates from Unlit don’t linger and get mixed with the new files.
Pay special attention the files from Samples/Media/Hlms/Unlit match 1:1 the ones in your project and there aren’t stray .glsl/.hlsl/.metal files from an older version.
If you have customized the Unlit implementation, you may find your customizations to be broken. But they’re easy to fix. For reference look at Colibri’s twocommits which ported its Unlit customizations from 2.2.x to 2.3.0
Added HlmsMacroblock::mDepthClamp
It is now possible to toggle Depth Clamp on/off. Check if it’s supported via RSC_DEPTH_CLAMP. All desktop GPU should support it unless you’re using extremely old OpenGL drivers. iOS supports it since A11 chip (iPhone 8 or newer)
Users upgrading from older Ogre versions should be careful their libraries and headers don’t get out of sync. A full rebuild is recommended.
The reason being is that HlmsMacroblock (which is used almost anywhere in Ogre) added a new member variable. And if a DLL or header gets out of sync, it likely won’t crash but the artifacts will be very funny (most likely depth buffer will be disabled).
Added shadow pancaking
With the addition of depth clamp, we are now able to push the near plane of directional shadow maps in PSSM (non-stable variant). This greatly enhances depth buffer precision and reduces self-occlusion and acne bugs.
This improvement may make it possible for users to try using PFG_D16_UNORM instead of PFG_D32_FLOAT for shadow mapping, halving memory consumption.
Shadow pancaking is automatically disabled when depth clamp is not supported.
Vulkan is ready!
In Ogre-Next 2.3, Vulkan is considered stable. If you find a bug, please report it.
Most notable known issue is that it appears there are some issues when integrating with Qt we haven’t looked into yet.
PluginOptional
Old timers may remember that Ogre could crash if the latest DirectX runtimes were not installed, despite having an OpenGL backend as a fallback.
This was specially true during the Win 9x and Win XP eras which may not have DirectX 9.0c support. And stopped being an issue in the last decade since… well everyone has it now.
This problem came back with the Vulkan plugin, as laptops having very old drivers (e.g. from 2014) with GPUs that were perfectly capable of running Vulkan would crash due to missing system DLLs.
Furthermore, if the GPU cannot do Vulkan, Ogre would also crash.
We added the keyword PluginOptional to the Plugins.cfg file. With this, Ogre will try to load OpenGL, D3D11, Metal and/or Vulkan; and if these plugins fail to load, they will be ignored.
Make sure to update your Plugins.cfg to use this feature to provide a good experience to all of your users, even if they’ve got old HW or SW.
Rather than rendering features, Ogre 2.4 will be focusing on robusting its source code base. There is a lot of code debt which needs to be addressed.
Most notably:
We will change the project from “Ogre” to “Ogre-Next”. The PR is already on its way and has been sitting in the backburner because we didn’t want to risk such a potentially breaking change so close to 2.3’s release. This change will allow installing Ogre 1.x and Ogre-Next side by side at the same time
Move to C++11 and up
Users may remembers my stance on C++11 adoption. Since then, while sadly the bloat is still there (literally compiling with C++98 is just faster because std headers bring in a lot of unnecessary baggage) HW has become faster, compilers did make some marginal improvements on build speeds, and most importantly we’re seeing more trouble maintaining C++98/03 support than just moving to C++11.
Additionally, we’ve long been wanting to use some of the C++11 (and up) built in features such as override keyword which help improve code quality.
Remove dead and deprecated code
Remove Boost (all Boost functionality we depended on can be found on the STL in C++11)
As for features, we will work on those needed by CIVCT:
Metal will start using Root Layouts, just like Vulkan. This will allow us to support a lot more textures and UAVs per shader.
Hlms implementations have a lot of duplicate Samplers for per-pass resources. We must merge them because on D3D11 CIVCT runs out of the limit of 16 samplers.