The parameters are expected to be in the green and blue channels (as per glTF2.0) and lighting will be done according to the Filament equations. Alternatively, you can use material-wide settings, by omitting the texture part like:
Here, metalness is read from specular[0] and roughness from specular[1].
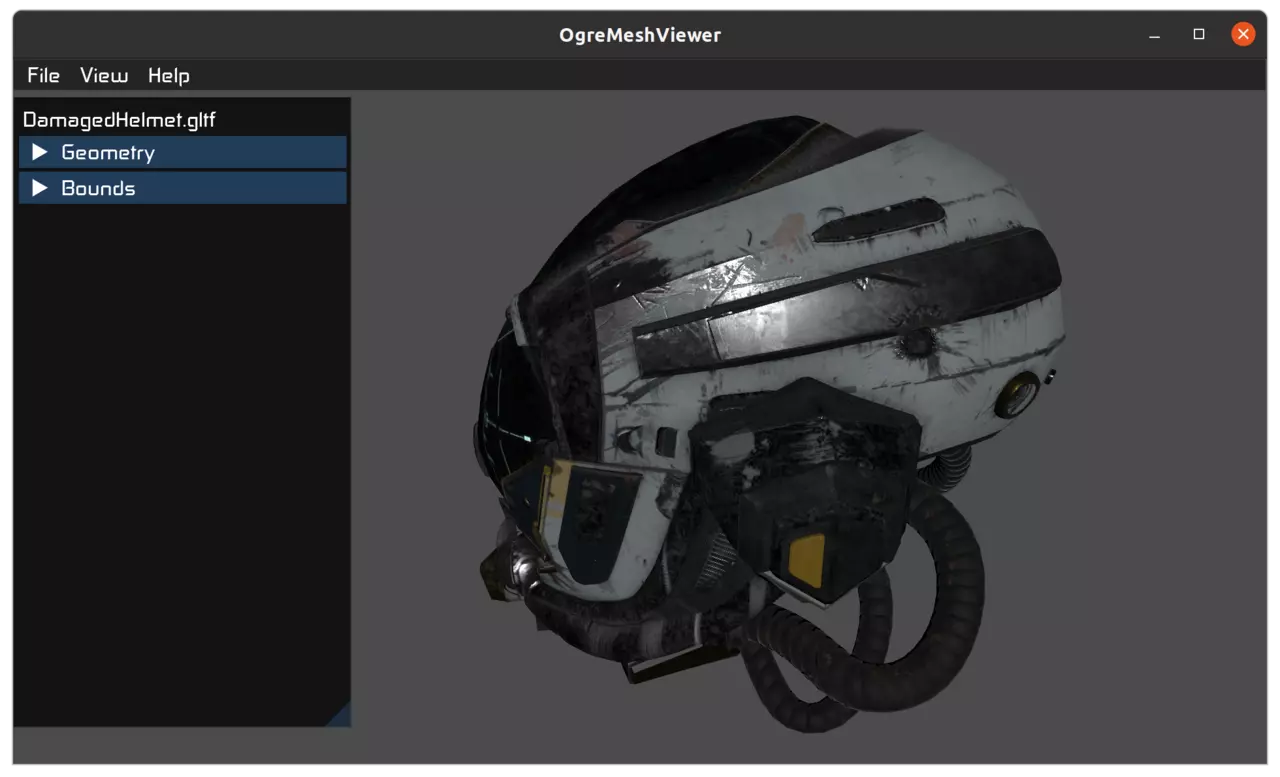
Furthermore, the Assimp Plugin will automatically use the PBR pipeline, if it encounters any PBR maps. This in turn allows correctly loading and displaying glTF2 meshes – as shown in the ogre-meshviewer screenshot above.
Improved Gamepad Support
The Gamepad Support in OgreBites (via SDL2) has been improved. Now the according events are correctly delegated to ImGui, so you can control the UI with your gamepad.
Also additional gamepad mappings can be specified by placing a gamecontroller.txt in the working directory.
Those of you who have been around Ogre for some time might remember that back in 2020, we conducted a survey about our user base. The results of which can be found here.
For the Ogre 13 development cycle we would like to assess to correctly emphasize the development on the most used features.
So for the next four weeks until the 10th of February, you have the chance to participate and help us to get an impression about our user base, how Ogre is used and share some wishes for the future. Simply follow the link and make your way through the 14 questions. It should not take up much time since most of the questions are simple checkbox or radio button questions.
We want to thank you all upfront for helping us to develop Ogre further and getting some valuable insight information about the people using the engine!
PS: We would be glad if you could spread the word about the survey via all available channels to all potential Ogre users, because: The more participants, the more accurate are the results of course.
The elephant in the Room is likely the addition of the Vulkan Rendersystem – as was announced earlier. Contrary to my expectation, progress was quite smooth though. This means that all basic features are already in place and the RTSS and Terrain Components support Vulkan too. Therefore, the Vulkan RenderSystem is now tagged [BETA] instead of [EXPERIMENTAL]. Still, some more advanced features are currently missing.
Fresnel Sample Running on Vulkan
Depending on your usage, you might be able to already port your application – at least you can already start familiarizing with it. There are two caveats though..
Buffer updates
Currently Ogre does not try to hide the asynchronicity of Vulkan from the user and rather lets you run into rendering glitches. The general idea of Vulkan is that you have multiple images in flight to keep the GPU busy. This means that we submit the work for the next frame without waiting for the current frame to finish. This part hits you as soon as try to update vertex data. If the GPU is not yet done processing it, you will get rendering glitches. Particularly, your rendering will be broken if you update the data each frame. The solution here is to either implement triple-buffering yourself or discard the buffer contents on update, which will give you new memory on Vulkan. The Ogre internals have been updated accordingly and ideally also improve performance on all other rendersystems.
Rendering interruption
Closely related to the above is rendering interruption. This means that after the first Renderable was submitted for the current frame (i.e. RenderSystem::_render has been called), you decide to load another Texture or update a buffer.
As we dont know whether the update affects the current Frame, we would need to interrupt the rendering, do the upload and continue where we left off. While certainly possible, we just throw an exception right now. Typically, it is much easier to just schedule your buffer updates before rendering kicks off, than ordering things mid-flight. And this is faster too.
Using GLSLang with GL3+
As the RTSS was extended to generate SPIRV compatible GLSL for Vulkan, it was natural to enable this path for GL3+ as well. If the gl_spirv profile is supported, you can now call
mShaderGenerator->setTargetLanguage("glslang");
to use the glslang reference compiler instead of whatever your GL driver would do.
HiDPi support in Overlays
Some dangling threads in Overlays were fixed and you can now call
which will scale up the UI appropriately and generate higher resolution Fonts. The magic 96 means 96 DPI which is the common setting of all Monitors up to FullHD.
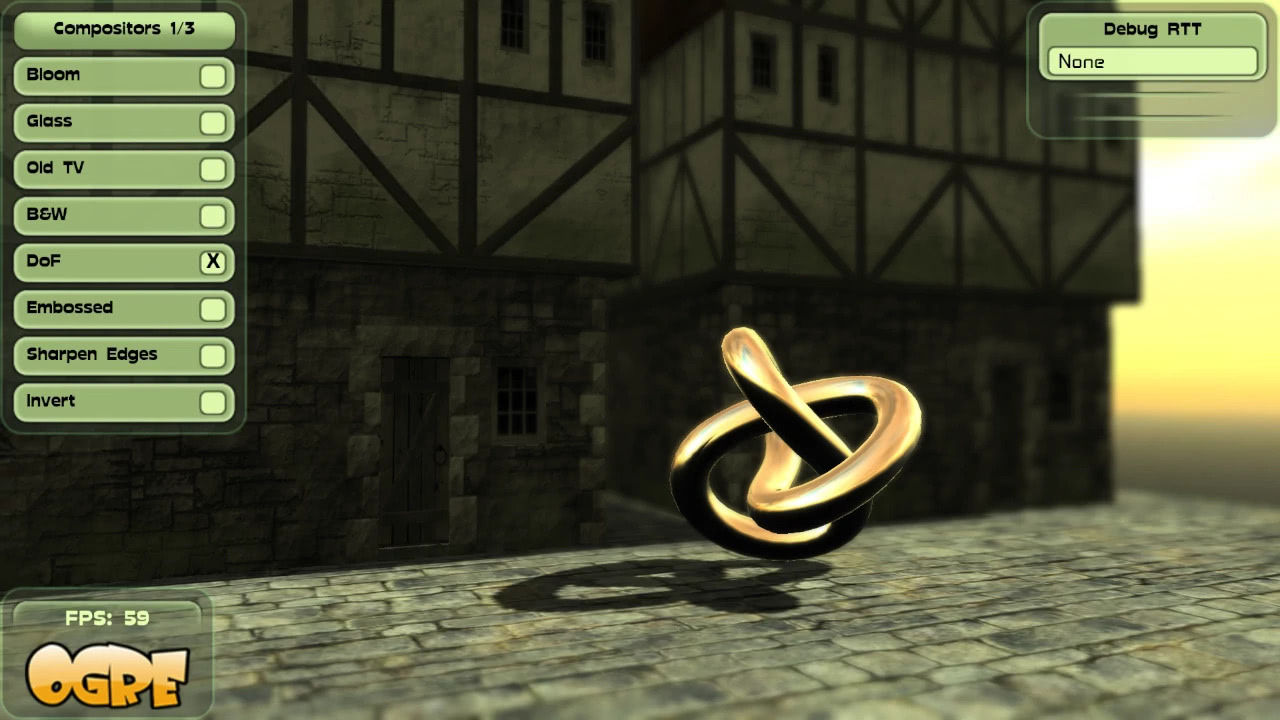
Depth of Field Sample
I have updated the dormant DoF compositor code we had in Ogre to actually do something.
The Vulkan RenderSystem backport from Ogre-next, now has landed in the master branch and will be available with Ogre 13.2. See the screenshot below for the SampleBrowser running on Vulkan
The code was simplified during backporting, which shows by the size reduction from ~33k loc in Ogre-Next to ~9k loc that are now in Ogre.
The current implementation pretends to have Fixed Function capabilities, which allows operating with one default shader – similarly to what I did for Metal. This shader only supports using a single 2D texture without lighting. E.g. vertex color is not supported. This is why the text is white instead of black in the screenshot above. Nevertheless, it already runs on Linux, Windows and Android.
Proper lighting and texturing support, will require some adaptations to the GLSL writer in the RTSS, as Vulkan GLSL is slightly different to OpenGL GLSL. This, and the other currently missing features will hopefully come together during the 13.x development cycle. If you are particularly keen on using Vulkan, consider giving a hand. Right now, the main goal is to get Vulkan feature-complete first, so dont expect it to outperform any of the other RenderSystems. Due to being incomplete, the Vulkan RenderSystem is tagged EXPERIMENTAL.
The per-pixel RTSS stage gained support for two sided lighting. This is useful if you want to have a plane correctly lit from both sides or for transparency effects, as shown below:
single sided/ two-sided lighting
Furthermore, PCF16 filtering support was added to the PSSM RTSS stage. This gives you softer shadows at the cost of 4x the texture lookups. The images below show crops from the ShaderSystem sample at 200% highlighting the effect
PCF4/ PCF16
blender2ogre improved even further
Thanks to the continued work by Guillermo “sercero” Ojea Quintana, blender2ogre gained some exciting new features.
The first is support for specifying Static and Instanced geometry like this. You might wonder whether you should be using that and if yes, which variant. Therefore, he also collected the respective documentation which is available here.
The second notable feature is support for .mesh import, which might come handy if you are modding some Ogre based game or just lost the source .blend file. This feature is based on the respective code found in the Kenshi Blender Plugin (which in turn is based on the Torchlight plugin).
Then, old_man_auz chimed in and fixed some bugs when exporting to Ogre-Next, while also cleaning up the codebase and improving documentation.
Finally, yours truly added CI unit-tests, which make contributing to blender2ogre easier.
OpenAL EFX support in ogre-audiovideo
Again, contributed by sercero are some important additions to the audio part of the ogre-audiovideo project which drastically improve the useability.
The first one is that you no longer need boost to enable threading. OgreOggSound will now follow whatever Ogre is configured with.
The second one is being able to use EFX effects with openal-soft instead of the long-dead creative implementation. This enables effects like reverb or bandpass filters.
Read more in the release-notes. This release was too, done by sercero which kindly took the burden of co-maintaining the project.